Introduction
The purpose of this lab is to implement PID control on the robot. PID control is very important, as the robot can deviate in its motion over time due to various factors, and using PID allows the robot get back in intended motion. PID involves using coefficients that affect the movement differently. P refers to proportional, I refers to integral, and D refers to derivative, any combination of which can be used to establish P, PI, PD, or PID control.
Prelab
Debugging is very important in creating a solution. For the robot, to control it over bluetooth, I would have used the running bluetooth code from Lab 4 and added a few functions to store data from the ToF sensor, similar to the code for getting 5 seconds worth of ToF data, as can be seen below.
This data would be taken while the robot is moving forward by the forward(int seconds) function from lab 5, and the robot is stopped after the five seconds are up. The ToF data is sent over bluetooth so that when performing the PID control, I would be able to see what the robot is "seeing" and be able to debug any issues.
Position Control
This task requires driving the robot as fast as possible toward a wall, and stopping it exactly 1 foot away from the wall using the ToF sensor data. I planned on using a P (proportional) controller for simplicity, whereby the updated speed is equal to error multiplied by the p-coefficient. This way, the robot eventually moves back and forth until the wall is exactly 1 feet in front of it. The following code peforms the P control. In each iteration of void loop(), the motor's speed would be updated by PID_step, and thereby later in the code the PWM value based on the direction of speed would be updated accordingly.
In the P-control, if error equals 0, then the new speed would be 0, causing the robot to stop, as expected, at one feet from the wall.
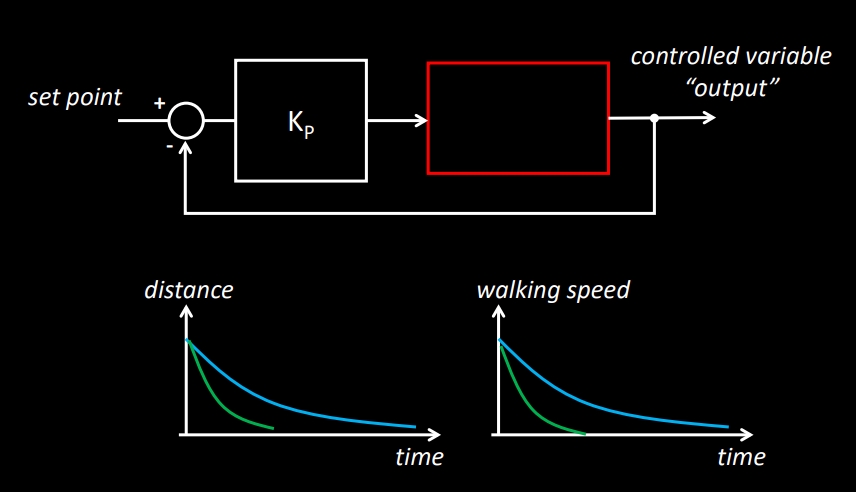
Although I do not have a video, the expected behavior of the robot would be that it would first overshoot a little, going closer than 1 feet to the wall, and then it would go backwards to correct this, and repeat a few times until the error equals 0, and it stops as mentioned above. For reference, I found this behavior exhibited in my classmates' experiments, but it makes sense, because the expected behavior of a p-control system depending on the k_p value, is either slow convergence to the objective, as can be seen in the example below, or converging oscillation until it reaches its objective.
If I were to have been able to do the P-control, I would have experimented with a few values of k_p so that it overshoots by little to no amount, as overshooting by a large amount can cause the robot to collide with the wall, which is not a desired outcome. Based on what my classmate Raphael Fortuna used, a value of k_p = 0.03 caused his robot to overshoot a little and oscillate back and forth until 1 foot away from the wall. Hence, a slightly smaller value than 0.3, even by a change of thousandths as shown in the lab handout with the example PI controller, could cause the robot to gradually slow down to 1 feet.